
REMUS Autonomous Underwater Vehicle
The REMUS is designed to perform hydrographic reconnaissance in the Very Shallow Water (VSW) zone from the 40’ to 10’ depth curve. The system is comprised of the vehicle and auxiliary equipment to support its mission and maintenance, as well as software programs for pre-mission programming, and post mission data analysis. The REMUS vehicle weighs 80 pounds, including typical ballasting (trim) weights. It is 62 inches long and 7.5 inches in diameter. Commands are programmed into the REMUS onboard computer prior to launch, which give the vehicle the instructions needed to perform an autonomous search. The vehicle maintains a programmed speed, depth, and course using its on-board sensors, motion algorithms, and navigation systems. The sensors are also used to collect mission data. Additional information about REMUS components is provided later.

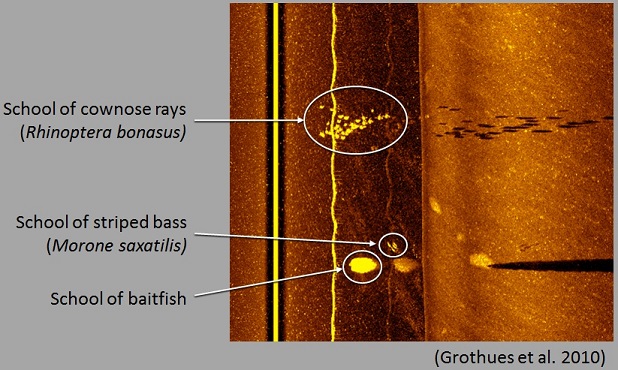
During a mission, the vehicle collects side-scan sonar images that can be used to detect objects on or near the sea floor. The vehicle also collects data that can be used to generate a hydrographic (bathymetric) map, as well as maps of water currents, water clarity, water temperature, salinity, and some of its acoustic properties. Since the vehicle knows its location in latitude and longitude at all times and this information is recorded with the collected data, returning to a detected target or determining its location is a simple task. Data is stored in the vehicle’s systems until it is downloaded following recovery. In addition to the data previously described, information on how the vehicle performed during the mission is also recorded. This information can be used to show a replay of the vehicle’s route, and can also be used to analyze performance characteristics during the mission such as propeller RPM, heading, depth, battery usage, etc.
The propeller on the aft end of the vehicle drives it through the water at speeds from 3 to 5 knots. Two horizontal fins forward of the propeller control the vehicle’s depth by causing it to angle upward or downward (pitch). Two vertical fins control the vehicle’s heading, causing it to turn to port or starboard (yaw). The vehicle must be moving for these fins to work. When the vehicle is powered up the vertical fin also provides the operator with visual indications of possible malfunctions by rotating to its full left or right positions.

The vehicle is positively ballasted to approximately 1 lb. for operating in most ocean environments. When the vehicle’s propeller stops turning, the vehicle stops moving, and it will float to the surface. Operating the vehicle in brackish or fresh water may require user adjustments to the ballast to ensure that positive buoyancy is maintained.
The vehicle normally navigates itself while underwater by computing its range to two acoustic transponders that are part of the REMUS system. Since GPS satellite signals cannot be received underwater, vehicle navigation accuracy is relative to, and dependent upon, the position of the acoustic transponders. The accuracy of the transponder coordinates determined during mission planning, and the precision with which the transponders are placed, determine how accurately the vehicle navigates itself, which, in turn, determines the accuracy of the positions of objects detected by the vehicle’s sensors.

The vehicle is powered by rechargeable lithium-ion battery packs. Removing an external magnet located on the mid-body vehicle housing turns on power to the vehicle. The magnet should be in place when the vehicle is not in use to avoid accidental discharging of the batteries and/or inadvertent starting of the vehicle. The REMUS has an operational duration of approximately 9 hours at 5 knots when the batteries are fully charged. At 3 knots, mission duration of 20 hours is possible. During mission planning and post-mission analysis, the vehicle can be powered externally using a Power/Data Interface Box (provided with system). Using this method reduces battery drain. The Power/Data Interface Box is also used to recharge the vehicle’s batteries.
Components of the REMUS System
Components of the REMUS system are listed below. General physical and functional characteristics of the REMUS are provided in Table 1.
- REMUS – autonomous underwater vehicle used to perform hydrographic reconnaissance.
- Transponders – acoustic transmit/receive units that allow the REMUS to determine its position via triangulation.
- The RANGER – used to track the position of the vehicle in real-time, and/or to send selected commands such as “abort mission” or “come home” to the vehicle during operation.
- Precise Lightweight GPS Receiver (PLGR II) – used to place the REMUS transponders.
- The Rocky II laptop computer – used to program REMUS missions, analyze data collected by the vehicle, and view the operational status of the vehicle.
- CD writer – used with laptop to archive data files for permanent storage.
- The Power/Data Interface Box – used to speed the transfer of data between the REMUS vehicle and the Rocky II laptop computer, and to provide external power to the vehicle for battery charging.
- Transportation containers – two equally sized plastic shipping/storage containers; one container with an integral cradle for securing the vehicle, the second container for protection and transport of REMUS auxiliary equipment.
| Physical/Functional Area | Characteristic | |
|---|---|---|
| Metric | US | |
| Vehicle Diameter | 19 cm | 7.5 in |
| Vehicle Length | 158 cm | 62 in |
| Weight in air | 36 kg | 80 lbs. |
| External Ballast Weight | 1 kg | 2.2 lbs. |
| Transportation Container Dimensions | 178 X 41 X 38 cm | 70” X 16” X 15” |
| Vehicle Transportation Container Weight with Vehicle | 67 kg | 147 lbs. |
| Auxiliary Transportation Container Weight with Equipment | 62 kg | 138 lbs. |
| Operating Depth Range | 3 m to 20 m | 10 ft to 66 ft |
| Transit Depth Limits | 100 m | 328 ft |
| Typical Search Area | 800 m X 1000 m | 875 yds X 1093 yds |
| Typical Transponder Range | 1500 m | 1640 yds |
| Operational Temperature Range | 0°C to +37.8°C | +32°F to +100°F |
| Transportation Temperature Range | -31.7°C to +62.8°C | -25°F to +145°F |
| Speed Range | 0.25 m/s to 2.8 m/s | 0.5 knots to 5.6 knots |
| Maximum Operating Water Current | 1.0 m/s | 2 knots |
| Maximum Operating Sea State | Sea State 2 | |
| Battery | 1 kW-hr internally rechargeable Lithium-ion | |
| Endurance | 20 hours at optimum speed of 3 knots (1.5 m/s) 9 hours at 5 knots (2.5 m/s) | |
| Propulsion | Direct drive DC brushless motor directly connected to open three bladed propeller | |
| Control | 2 coupled yaw and pitch fins | |
| On/Off | Externally mounted magnetic switch | |
| Vehicle External Electrical Connectors | 1 – Ethernet connector for vehicle power, battery charging and data transfer, (1 pin, 2 conductor) 1- Serial Connector for data transfer, (2 pin, 4 conductor) | |
| Vehicle Indicators | Detailed status indication of mission plan and all internal systems, when connected to laptop computer. Clear go/no-go indication via status LED and rudder fin indicator, even when not connected to laptop. | |
| Navigation Modes | Long baseline, ultra short baseline, dead reckoning |
Recent Publications
- Eiler, J. H., T. M. Grothues, J. A. Dobarro, and M. M. Masuda. 2014. Comparing autonomous underwater vehicle (AUV) and vessel-based tracking performance for locating acoustically-tagged fish. Marine Fisheries Review 75(4):27-42.
- Biesinger, Z, B. M. Bolker, D. Marcinek, T. M. Grothues, J. A. Dobarro, W. J. Lindberg. 2013. Testing an autonomous acoustic telemetry positioning system. Limnology and Oceanography: Methods 448:46-56.
- Grothues, T. M., J. Dobarro. 2010. Fish telemetry and positioning from an autonomous underwater vehicle (AUV). Proceedings of Martech09, Barcelona, Spain.
Contact
For additional information regarding REMUS and the daily rate, contact Rose Petrecca, Director of Marine Operations: e-mail; (609) 296-5260 Ext. 238.